Para controlar un servomotor con arduino, este nos lo pone muy fácil. A la facilidad de uso de estos dispositivos, se suma el de disponer de una librería nativa en el propio IDE de arduino.
Que es un servomotor o servo?
 Los servomotores son simples motores DC con una caja de engranajes para reducir la velocidad de giro de este, y sumado a una electrónica para el control de la posición.
Los servomotores son simples motores DC con una caja de engranajes para reducir la velocidad de giro de este, y sumado a una electrónica para el control de la posición.
Como todo en esta vida, los hay de diferentes tipos, fuerzas, tamaños y como no colores.
El precio de los servos varían desde poco más de 1€, se pueden encontrar en Aliexpress o Amazon, hasta de varios cientos de euros, para sistemas industriales.
Para el uso que normalmente se hace de ellos, tanto en robótica «domestica», como para pequeños proyectos donde el coste del prototipo no queremos que se nos salga de madre, con los baratos nos es más que de sobra.
Servomotores más habituales.
El modelos más habitual en el montaje de pequeños robot, o brazos articulados el servo más habitual es el modelo SG90, también se le conoce como 9g, creo que porque su peso es ese. Este servomotor nos ofrece tanto una calidad más que aceptable para nuestros proyectos, como un precio muy contenido, este suele estar por los poco más de 1€. Este tiene una caga de engranajes de plástico, por lo que si nuestro proyecto va a necesitar que desarrolle mucha fuerce, sera mejor utilizar otro tipo de servomotor. El tamaño de este es muy contenido y la mayoría de chasis, ya sea de vehículos, robots o brazos articulados, suele venir diseñados para albergar este tipo de servos. Otro modelo muy utilizado es el MG90 de tamaño y forma idéntico al SG90, pero con la caja de engranajes en metal. Al tener los engranajes de metal del par de fuerza que puede aguantar es mayor.
Que necesito?
Para trabajar con un servo y arduino, los materiales que vamos ha necesitar son los siguientes.
Materiales usados
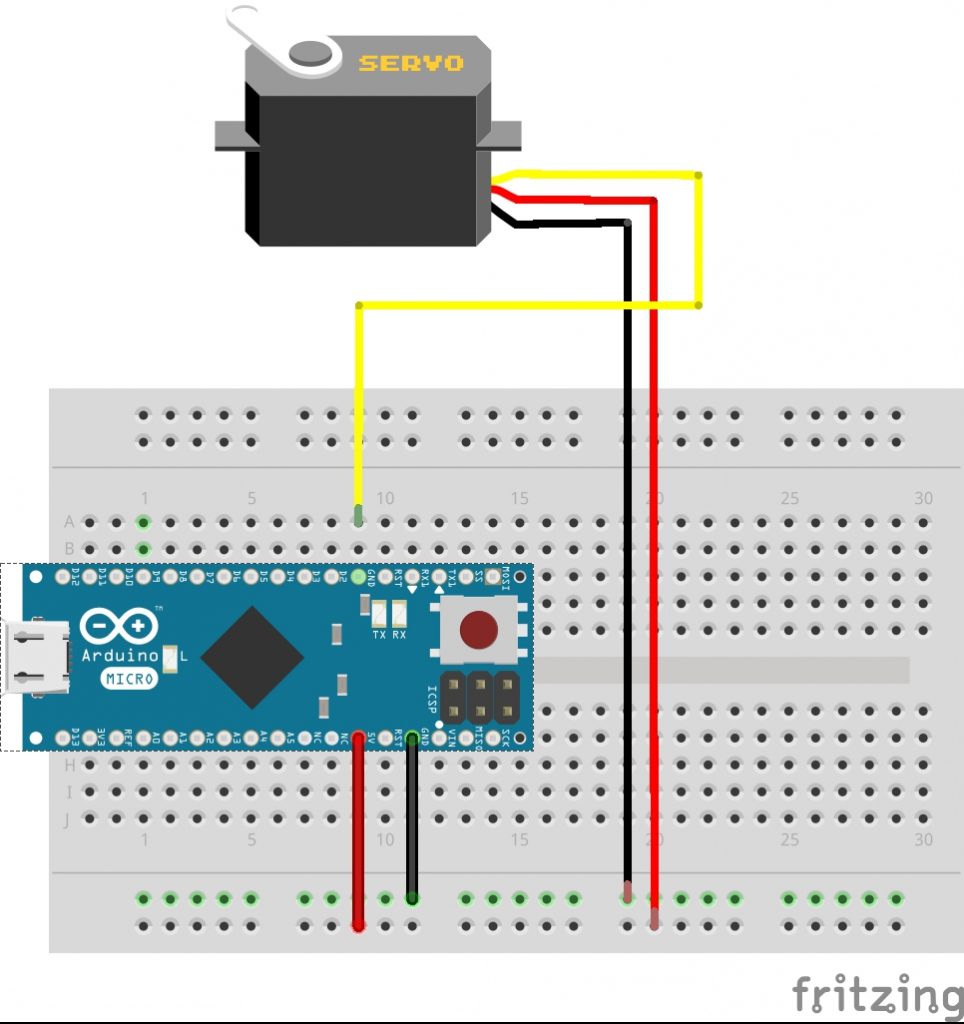
Esquema de montaje de un servomotor controlado con Arduino.
El esquema de montaje de un servomotor controlado con arduino es muy simple. Los cables de los que dispone el servo son muy simples, un cable de color rojo, para el positivo, este suele estar alimentado entre 4,8v hasta los 7v. Por que si no tenemos muchos dispositivos conectados a nuestro arduino, lo podremos alimentar con el sin ningun problema. Cable de color negro, como es normal el negativo del servo, si alimentamos nuestro servo con una alimentación externa al arduino no debemos que olvidarnos de unir todos las masas del proyecto, para homogeneizar esta. Y por ultimo es el cable de color amarillo, este es el de control del servo. Este cable de control lo conectaremos a cualquier pin PWD de nuestro arduino.
Esquema de montaje.
Codificación del servomotor con arduino
Para programar el servo con muestro arduino no tiene mayor complejidad. El propio IDE de Arduino dispone de una librería para el control de estos aparatos. Solo tendremos que ir a la opción de «Programa» –> «Incluir libreria» –> «Servo» o directamente escribir en nuestro código.
#include <Servo.h>
Una vez agregada la librería, solo tenemos que crear un objeto el cual controlara nuestro servo.
Servo controlServo;
Lo siguiente que deberemos hacer sera indicarle a nuestro objeto, en que pin esta conectado nuestro servo, esta operación se hace mediante el comando attach, este comando tiene dos versiones. La versión simple, a la cual solo le pasaremos como parametro el numero del pin al cual tenemos conectado nuestro servomotor.
controlServo.attach(4);
Y la versión extendida, en esta versión, ademas de pasar el pin donde esta conectado el servo, tambien le pasaremos el valor mínimo y máximo de tamaño de la onda de control del servo.
controlServo.attach(4, 200, 2100);
En el 99,9% de los casos, con pasarle el pin donde esta conectado el servo en el arduino sera más que suficiente.
Si queremo «desenlazarnos» de el la librería Servo de Arduino nos ofrece la posibilidad de hacerlo mediante el comando detach(). Solo con llamarlo nos desconectaremos del servomotor.
controlServo.detach()
Para comprobar que estamos conectados a un servo, contamos con el siguiente comando attached(), este nos devolverá «True» si estamos conectados o «False» si no lo estamos.
if (controlServo.attached() == true)
{
Serial.print('Estamos conectados al servo');
}
else
{
controlServo.attach(4);
}
Para poder situar el servo en el ángulo que deseemos utilizaremos el comando write(). Ha este comando le pasaremos como parámetro el angulo en el que queremos posicionar nuestro servo.
controlServo.write(90);
Si queremos saber en que posición se encuentro nuestro servo utilizaremos el comando read(). Este nos devuelve el angulo en el que se encuentra nuestro servomotor.
int posServo;
posServo = controlServo.read();
Y con estos simples comando tendremos un control absoluto sobre los servomotores que tengamos conectados a nuestro Arduino.
Ejemplo completo del uso de servomotores con arduino.
#include <Servo.h>
Servo controlServo;
int pinServo = 4;
int posServo = 0;
void setup() {
// put your setup code here, to run once:
// Paramentros de Servo.attach(pin, min, max)
// pin -> pin donde esta conectado la señal de servo
// min -> Valor minimo de la onda del servo
// max -> Valor maximo de la onda del servo
controlServo.attach(pinServo);
}
void loop() {
// put your main code here, to run repeatedly:
if (controlServo.attached() == false)
{
controlServo.attach(pinServo);
}
posServo = controlServo.read();
if (posServo != 90)
{
// Posicionamos el servo en los 90 grados
controlServo.write(90);
// Esperamos 1 segundo
delay(1000);
}
else
{
// Lo posicionamos en los 180 grados
controlServo.write(180);
// Volvemos a esperar otro segundo
delay(1000);
}
controlServo.detach();
}
Si tienes alguna duda o sugerencia, no dudes en dejarnos tu comentario.